計測できる部分情報に基づいた渋滞予測・回避をこれまで研究してきました。
この目標を達成するためには、モデリングの問題がとても重要です。従来は、数学で分析を可能にするために、統計的独立性や分布を陽に定めるなどの仮定の下で行われました。ですが、それらの仮定を確認して使うことは現実的には難しい場合もしばしば起きます。ですので、分布の形状や統計的独立性を仮定することなく、観測できる事柄だけを用いて、待ち行列理論を展開できないかと考えています。
このような問題は、もっと広く、時系列データの予測の問題として解釈できます。特に、何かのイベントの予兆や原因を特定したり、滅多に起きないで欲しいイベントを制御するための因子を特定する問題は、実データを用いてこそできることです。
方法論として、機械学習と統計学の技術を組み合わせることが考えられます。
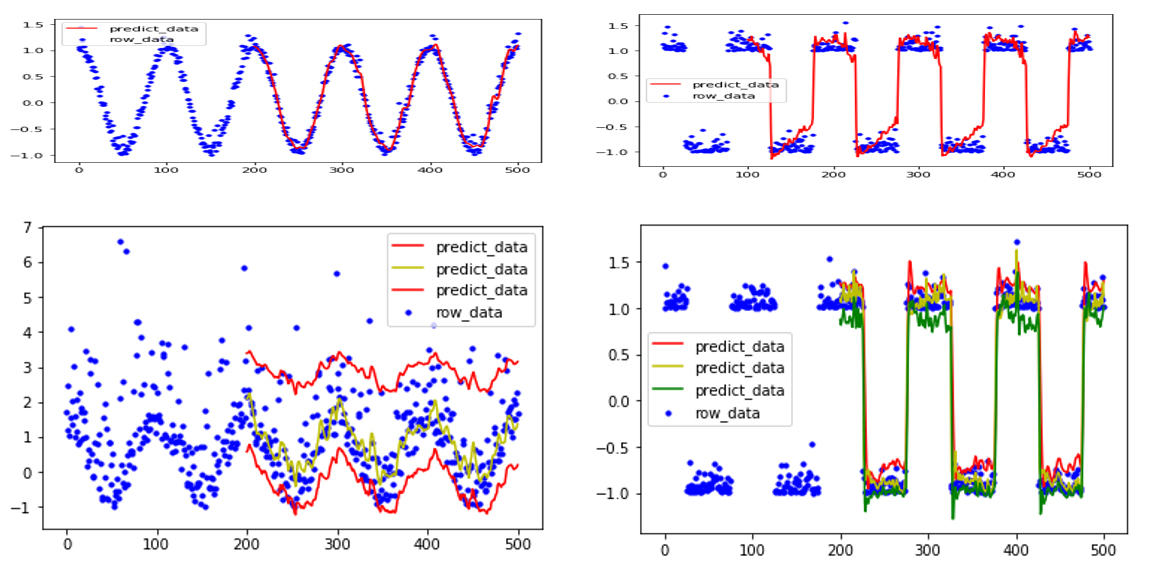
下図は青い点がコサイン関数にノイズを加えたもの(左)、もしくは-1,1のどちらかの値を交互にとる関数にノイズを加えたもの(右)を機械学習して、赤い線で予測しています。点推定(上)だけでなく、区間推定(下)も可能です。
上図はLSTMというモデルを使っています。下図はLSTMのプログラムを少量変更して深層分位点回帰という方法で実現しています。
予兆分析や、時空間系列データへの拡張、極端な信頼水準(分布の裾)の分析はまだ問題があり、解決していく必要があります。